
{kind=link}
Hoe stevig we iets vast moeten houden wordt automatisch bepaald door onze hersenen zodra wij een object aanraken. Hoe dit precies in zijn werk gaat, is een vraag waar wetenschappers tot op de dag van vandaag antwoord op proberen te vinden.
Tijdens de biologieles leren we dat wij dingen voelen doordat zenuwen onder onze huid signalen naar onze hersenen sturen zodra wij iets aanraken. Deze signalen worden afgegeven op basis van de krachten die op onze huid werken. Verschillende zenuwen worden geactiveerd onder verschillende krachten. Als we een voorwerp willen optillen raken we het eerst aan en hierdoor krijgen onze hersenen informatie binnen over het oppervlak. Deze informatie wordt vervolgens gebruikt om onze motoriek aan te sturen. Voor mensen is slechts een tiende seconde contact met een oppervlak nodig om te bepalen hoeveel kracht nodig is om een voorwerp met een bepaalde gladheid op te tillen. We zetten meer kracht als een voorwerp glad is en minder als een voorwerp ruw is. Als we niet goed in staat zijn om de wrijving van het oppervlak te peilen, bijvoorbeeld doordat onze hand verdoofd is of omdat we handschoenen aanhebben, dan worden we onhandiger en vallen dingen vaker uit onze handen. In die gevallen zetten we automatisch meer kracht om een object te kunnen vasthouden om te compenseren voor het feit dat we niet weten hoe glad het oppervlak precies is. Het is bewezen dat deze aanpassingen in kracht worden bewerkstelligd door de hoeveelheid wrijving die wij voelen en niet door de textuur van een voorwerp. Ondanks het alledaagse belang van de simpele handeling ‘iets oppakken’, is het echter nog altijd niet precies bekend welk mechanisme ervoor zorgt dat mensen de gladheid van een voorwerp kunnen inschatten door het aan te raken.
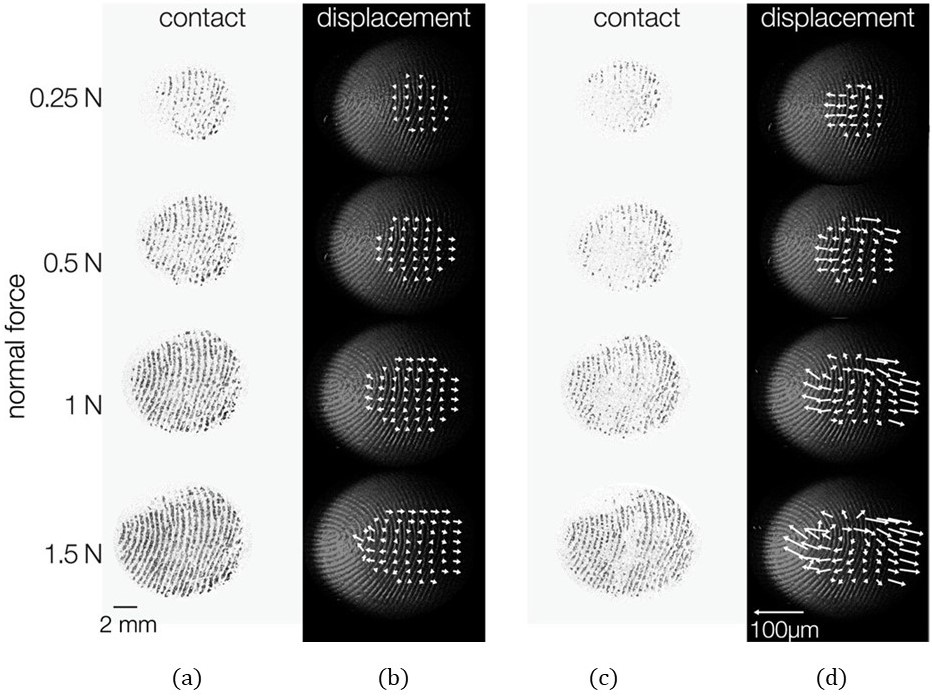
Onderzoekers van de TU Delft en het Institut des Sciences du Mouvement (Instituut voor de Bewegingswetenschappen) in Frankrijk hebben bewezen dat ons vermogen om wrijving in te kunnen schatten te maken heeft met de grote van de trekspanning op onze huid als we een voorwerp aanraken. Trekspanning is de kracht die op een oppervlak werkt als het wordt uitgerekt. Voor hun onderzoek hebben de wetenschappers meerdere deelnemers met één vinger op een glazen plaat laten drukken met een bepaalde hoeveelheid kracht. De hoeveelheid kracht die de deelnemers konden zetten werd bepaald door de onderzoekers. De gladheid van de glazen plaat kon vergroot of verkleind worden door middel van ultrasone trillingen – trillingen waarvan de frequentie te hoog is om gehoord te worden. Hoe groter de amplitude van die trillingen, hoe gladder het oppervlak aanvoelt. Dit zorgt ervoor dat de textuur die de deelnemers voelden altijd hetzelfde bleef, terwijl de gladheid van het oppervlak aangepast werd. Vervolgens werd er gekeken naar wisselwerking tussen de huid en de glazen plaat door middel van een speciale camera die het oppervlak van de huid filmt. Hiermee konden de onderzoekers meten hoe groot het contactoppervlak is tussen de huid en de glazen plaat en hoe de huid vervormt bij verschillende gladheden – zie afbeelding 2.
Met dit onderzoek is aangetoond dat uitrekking van de huid en de daaropvolgende trekspanning een bepalende factor is voor de hoeveelheid kracht die nodig is om een voorwerp op te tillen. Deze ontdekking is niet alleen belangrijk voor ons fundamentele begrip van de natuur, maar heeft daarnaast veel technische toepassingen. Veel verschillende industrieën maken tegenwoordig gebruik van robots voor het pakken en verplaatsen van objecten. Een belangrijk voorbeeld is de landbouwindustrie, waarin robots gebruikt worden voor het plukken van groente en fruit. Nu het bekend is dat de trekspanning op de huid direct gekoppeld is aan de gladheid van een object, kan men robots bouwen die hier gebruik van maken om te anticiperen hoeveel kracht ze op een voorwerp moeten uitoefenen om het op te tillen. Daarnaast kan deze kennis ook gebruikt worden bij het maken van betere protheses waarmee mensen mogelijk in staat zullen zijn om objecten op een natuurlijke wijze vast te pakken. Deze ontdekking heeft dus de potentie om een revolutie in het veld van de robotica teweeg te brengen. De toepassingen liggen voor het grijpen.
Publicatie
Willemet, Laurence, et al. “Initial contact shapes the perception of friction.” Proceedings of the National Academy of Sciences 118.49 (2021).