Hersenloos vegen
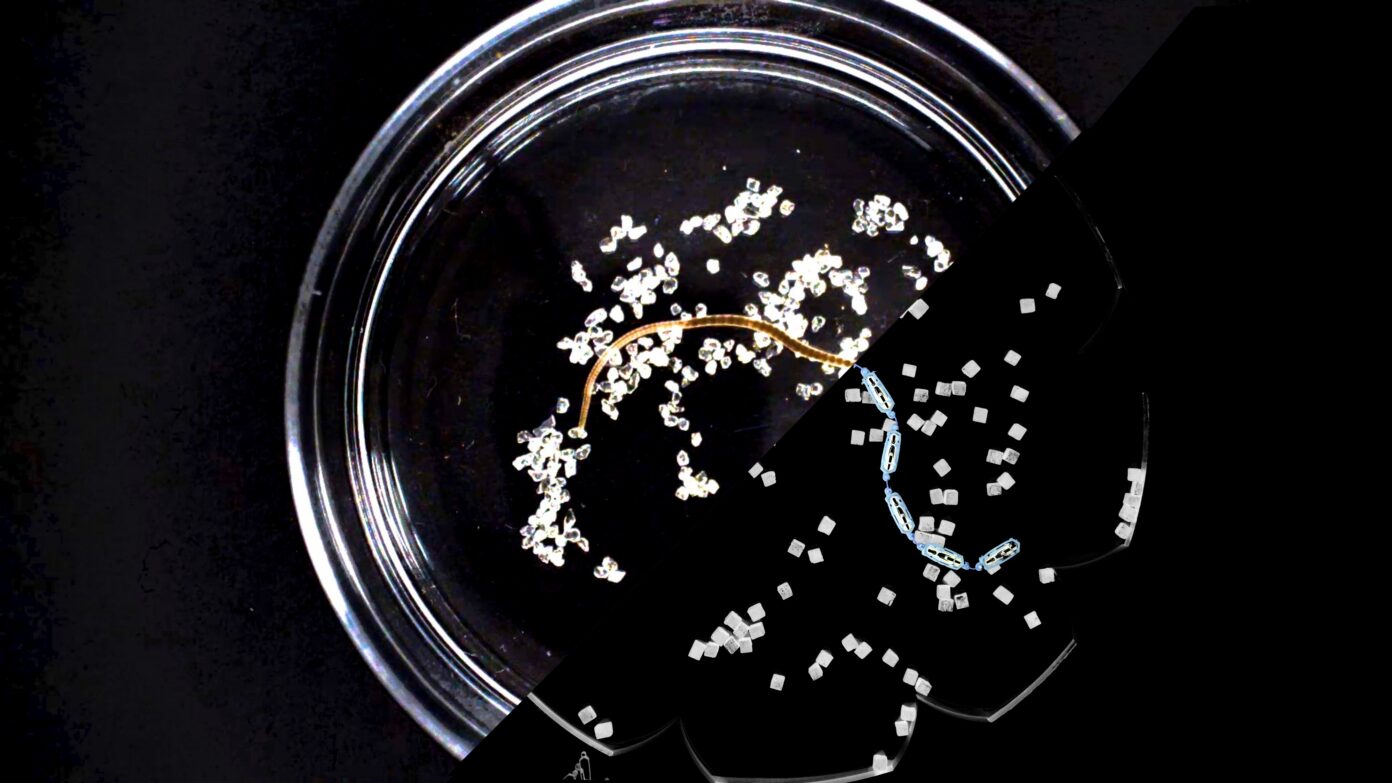
Als centimeterslange waterwormen, zoals T. tubifex of Lumbriculus variegatus, in een petrischaal met zanddeeltjes van minder dan een millimeter grootte worden geplaatst, gebeurt er iets verrassends. Na verloop van tijd beginnen de wormen spontaan hun omgeving op te ruimen. Ze vegen de deeltjes samen tot compacte clusters, waardoor ze hun omgeving geleidelijk opnieuw vormgeven en ordenen.
In onderzoek dat deze week in Physical Review X werd gepubliceerd, toont een team van onderzoekers aan dat dit opmerkelijke bezemgedrag geen hersenen vereist, en ook geen complexe interactie tussen de wormen en de deeltjes. In plaats daarvan komt het voort uit de natuurlijke golvende beweging en de flexibiliteit van de wormen.
Antoine Deblais van de Universiteit van Amsterdam en Saad Bhamla van Georgia Tech leidden het onderzoek. Deblais: “Het is fascinerend om te zien hoe levende wormen hun omgeving kunnen ordenen door zich simpelweg te bewegen.” Bhamla voegt daaraan toe: “De activiteit en flexibiliteit van de wormen zijn op zichzelf al voldoende om deeltjes te verzamelen en hun omgeving te hervormen.”
Door eenvoudige robot- en computermodellen te bouwen die de levende wormen nabootsen, ontdekten de onderzoekers dat alleen die twee ingrediënten – activiteit en flexibiliteit – voldoende zijn om de opruim- en verzameleffecten te reproduceren. Het resultaat is een zelforganiserende, dynamische vorm van herstructurering van de omgeving die puur wordt aangestuurd door beweging en vorm.
Rosa Sinaasappel voerde de robotexperimenten aan de Universiteit van Amsterdam uit. Ze legt uit: “Door de beweging van de wormen na te bootsen met simpele, hersenloze robots die met elkaar verbonden waren door flexibele rubberen schakels, konden we de twee essentiële ingrediënten voor het veegmechanisme identificeren.”
Orde ontstaat
De resultaten leren ons niet alleen een verrassende les over wormen. Het inzicht in hoe deze organismen spontaan deeltjes verzamelen, heeft veel bredere gevolgen. Technologisch gezien zou wat de onderzoekers hebben ontdekt, inspiratie kunnen bieden voor het ontwerp van zachte robots die materialen reinigen of sorteren zonder sensoren of voorgeprogrammeerde intelligentie. Zulke robots zouden, net als de wormen, simpelweg bewegen en de orde laten ontstaan uit de beweging. Dergelijke ‘hersenloze’ machines zouden wellicht ooit behulpzaam kunnen zijn bij het verwijderen van microplastics of sedimenten uit watermilieus, of complexe taken kunnen uitvoeren in onvoorspelbaar terrein.
Vanuit een biologisch perspectief bieden de resultaten ook inzicht in hoe langwerpige levende organismen – niet alleen wormen, maar ook langgerekte bacteriën, of cytoskeletale filamenten – hun eigen leefomgeving kunnen structureren en modificeren door middel van eenvoudige fysieke interacties. Het begrijpen van dit structurerende en modificerende gedrag is altijd een centrale vraag geweest voor bijvoorbeeld regenwormen en hun rol in de bodemventilatie.
Teamprestatie
Het project ontstond uit nieuwsgierigheid naar hoe levende systemen hun omgeving vormgeven zonder centrale controle. Oorspronkelijke experimenten met wormen, uitgevoerd door Harry Tuazon aan Georgia Tech, lieten onverwachte patronen zien in de opeenhoping van deeltjes. Dit bracht het team ertoe om te proberen dit gedrag te reproduceren met behulp van robots en gesimuleerde modellen – iets wat verrassend goed lukte. In het project werkten experimentatoren en theoretici zij aan zij, waardoor het team de fysische principes achter dit ogenschijnlijk doelgerichte gedrag kon ontrafelen.
R. Prathyusha van Georgia Tech voerde de computersimulaties van het gedrag uit. Ze legt uit: “Ons computermodel, gebaseerd op eenvoudige ingrediënten zoals voortstuwing en flexibiliteit, laat zien dat dit principe op verschillende schalen werkt en kan worden aangepast voor nieuwe ontwerpen, zoals gedemonstreerd door een zachte robotveger die autonoom deeltjes ‘opruimt’ en herschikt zonder geprogrammeerde intelligentie.”
De onderzoekers zullen dit soort gedrag in de toekomst verder onderzoeken. Hoewel er vanuit dit onderzoek nu een eenvoudig wiskundig model van het actieve vegen is gemaakt, blijven er voor theoretici nog veel uitdagende vragen onbeantwoord over dit complexe systeem.
Verschillende groepen studenten hebben enorm geholpen bij de robotexperimenten door projecten in het lab uit te voeren. Hun inspanningen varieerden van het uitvoeren van de experimenten tot het vervangen van de in totaal ongeveer 200 batterijen, na misschien wel een van de moeilijkste taken: ze uit de kindveilige verpakking verwijderen.
Publicatie
Particle Sweeping and Collection by Active and Living Filaments, Sinaasappel, R., Prathyusha, K. R., Tuazon, Harry, Mirzahossein, E., Illien, P., Bhamla, Saad en A. Deblais. Phys. Rev. X 16 (2026), 011003.