De experimenteel ingestelde tijdverdrijvende heeft misschien zelfs gemerkt dat het balanceren makkelijker wordt als je bijvoorbeeld een vlakgom aan de bovenkant van het potlood vastmaakt: het object zal nu langzamer vallen (het heeft meer moeite met draaien), waardoor het makkelijker wordt om je hand snel onder het vallende potlood-met-gum te positioneren wanneer het omvalt.
Wat ik hierboven beschreef is een typisch voorbeeld van een ‘aangedreven systeem’. Het systeem (het potlood dat overeind staat) begint in een bepaalde toestand (overeind op de handpalm), en gaat in de loop van tijd zijn evenwichtstoestand opzoeken. Dit is de toestand waarin de energie het laagst is. Met andere woorden: het potlood valt om. Als je echter het systeem blijft stimuleren, dan is het mogelijk om het omvallen te voorkomen. Het is dan mogelijk om het potlood in een andere stabiele toestand te dwingen. Hier doe je dat door het systeem continu aan te drijven door de onderkant van het potlood onder de bovenkant te bewegen.
Toch is het heel moeilijk om het potlood recht overeind te houden op deze manier. Dit komt bijvoorbeeld doordat het potlood twee verschillende richtingen op kan vallen. Het zou al een stuk eenvoudiger zijn om het potlood overeind te houden als die maar in één richting (alleen naar links en rechts, of alleen naar voor en achter) kan vallen. Als we ons hiertoe beperken, lijkt het systeem van het vallende potlood erg op een goed bestudeerd probleem in natuurkunde: de Kapitza-slinger.
De Kapitza-slinger
De Kapitza-oscillator of Kapitza’s slinger is een slinger die aangedreven wordt. Specifiek wordt bij een Kapitza-slinger het aangrijppunt van de slinger op en neer bewogen. Schematisch ziet zo’n slinger er zo uit:
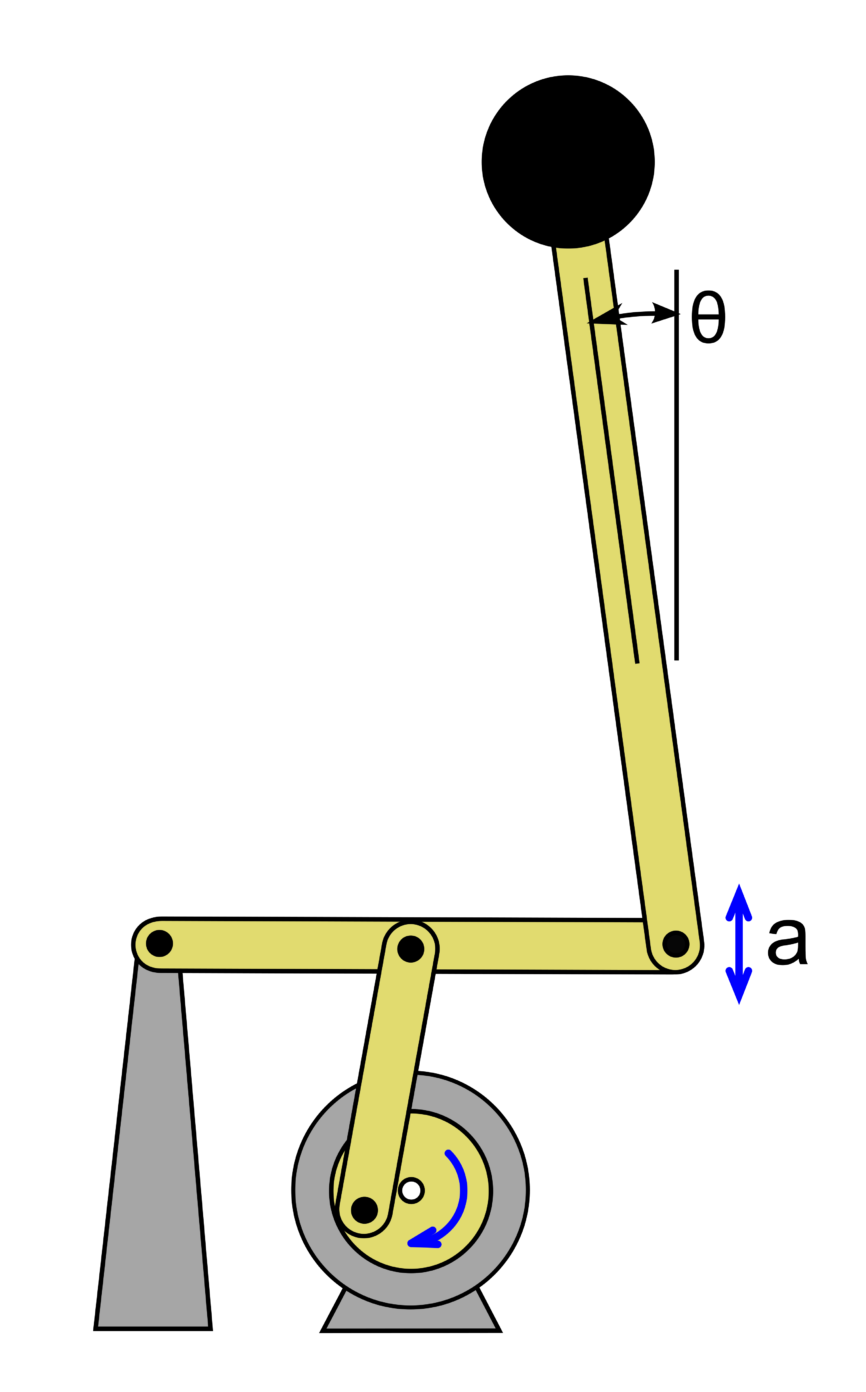
{kind=link}
Deze slinger werd niet ‘ontdekt’ door Kapitza, maar door Andrew Stephenson in 19081. Hij werd echter uiteindelijk vernoemd naar Pyotr Kapitza, toen die erin slaagde om in 1951 een verklaring te geven voor het eigenaardige gedrag van de oscillator. Het is namelijk zo dat de Kapitza-slinger zowel kan oscilleren als hij ‘naar boven staat’, als wanneer hij naar beneden hangt, en daarnaast kan hij ook nog eens volledige rondjes maken. Waar de slinger oscilleert hangt af van de keuzes die gemaakt worden bij het maken van de oscillator. Zo kan de lengte van de stok van de slinger langer of korter zijn en kan men de massa vergroten of verkleinen. Belangrijk is dat bij de Kapitza-slinger ook de aandrijffrequentie aangepast kan worden. Dit is de frequentie waarmee het ophangpunt van de slinger op en neer beweegt. Ten slotte kan je de grootte van deze op-en-neerbeweging aanpassen. Voor verschillende keuzes van deze eigenschappen (ook wel systeemparameters genoemd), zal de slinger oscilleren als hij ofwel hangt, ofwel recht overeind staat. Dat is al bijzonder: vergeet niet dat normale slingers altijd gaan ‘hangen’, ongeacht de keuzes voor de lengte van de slinger of het gewicht. Het is de specifieke aandrijving die het bij de Kapitza-slinger mogelijk maakt om deze rare bewegingen te maken. De animaties hieronder geven goed weer wat de verschillende mogelijkheden zijn.
De intuïtie
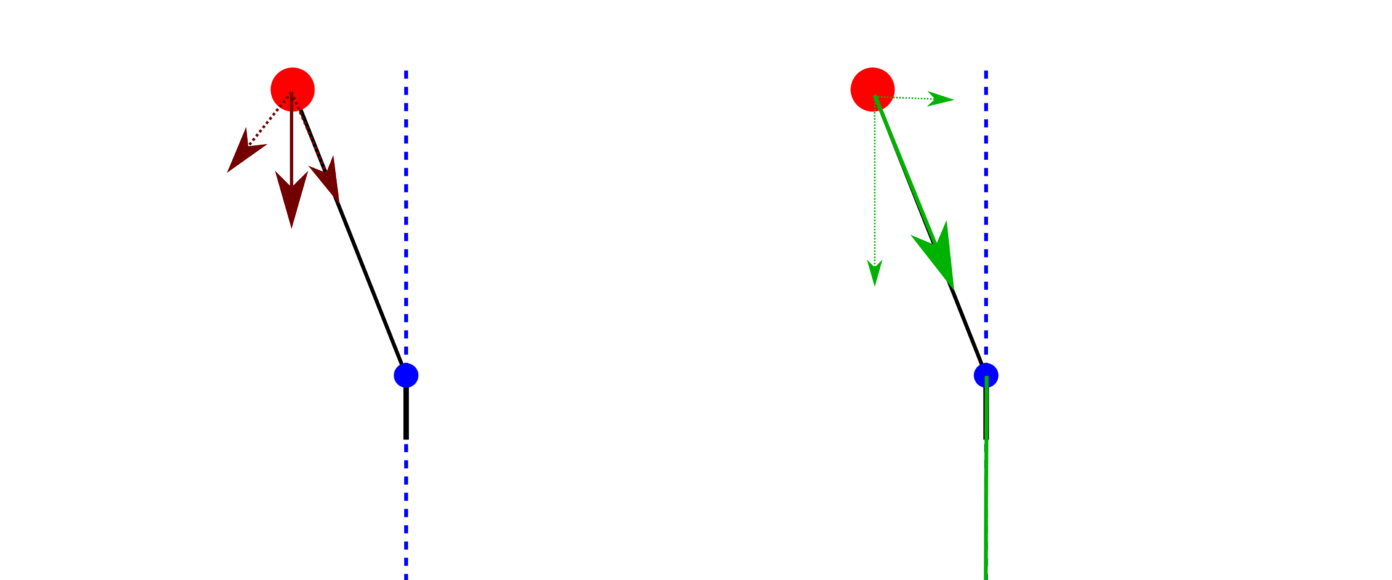
Hoe komt het dat de Kapitza-oscillator stabiel kan zijn terwijl hij recht overeind staat? Dit heeft alles te maken met het op een neer bewegen van het ophangpunt van de oscillator. Laten we eerst kijken of we een intuïtieve verklaring daarvoor kunnen geven. Dit gaan we doen aan de hand van een voorbeeld. Stel dat de slinger begint in de positie waar hij naar boven staat, zoals in afbeelding 4. De slinger zal nu vanzelf omvallen, bijvoorbeeld naar links, net zoals in ons voorbeeld van de pen aan het begin van dit artikel. Als de slinger begint te vallen, zal de top van de slinger (de ‘bol’ in afbeeldingen) iets naar links bewegen. Normaliter zou de slinger nu gewoon doorvallen naar beneden, en daar na een tijdje geoscilleerd te hebben in zijn evenwichtstoestand eindigen: naar beneden hangend. Dit laten we niet toe. Wat we dus doen, is het ophangpunt van het slinger snel naar beneden trekken. Hierdoor wordt de bol in de slinger schuin naar beneden getrokken: de bol ervaart ook een kracht naar rechts. Als we de totale trekkracht ontbinden in een horizontale en verticale component, zien we dat door dit ‘naar beneden trekken’ de bol weer naar het midden geduwd wordt. Als we de frequentie van dit aandrijven goed aanpassen aan de natuurlijke drang van de oscillator om ‘om te vallen’ door zwaartekracht, dan is het niet gek dat de slinger inderdaad zal oscilleren rondom de rechtopstaande positie.
De natuurkunde
De intuïtie hierboven kan een mooi beeld geven van de situatie, maar wat we in natuurkunde altijd het liefste willen is een complete verklaring van datgene wat er geobserveerd wordt aan de hand van formules. Voor een systeem zoals deze oscillator hebben we daarvoor grofweg twee methodes. Eén methode is het toepassen van de wetten van Newton en zodoende een formule te vinden voor de plaats van de slinger. Een naar mijn mening betere methode is de methode die gebruikmaakt van de zogeheten Euler-Lagrangevergelijking. Dit is een vergelijking die een algemeen recept vormt voor elk klassiek mechanisch systeem. Voor de wiskunde-liefhebbers: de Euler-Lagrangevergelijking ziet er als volgt uit:
\( \frac{d}{dt} \frac{\partial L}{\partial \dot{\phi}} = \frac{\partial L}{\partial \phi} \),
waarin de L de zogeheten ‘Lagrangiaan’ is, een grootheid die net zoals bijvoorbeeld de energie veel zegt over het systeem, en de \( \phi \) de vrijheidsgraden in het systeem parametriseert. In ons geval is \( \phi \) te hoek die de oscillator stang maakt ten opzichte van de verticale as. Als de slinger recht overeind staat, maakt hij een hoek van 0 graden met deze as. Een formule voor \( \phi(t) \) die de hoek beschrijft als een functie van tijd, vertelt je uiteindelijk precies hoe de slinger zich zal gedragen: de hoek is de enige variabele die ‘vrij’ is in dit systeem.
Als je in staat bent om de Euler Lagrangevergelijking op te lossen en zo \( \phi(t) \) te vinden, dan heb je het probleem opgelost. Dit is een lastige opgave voor de Kapitza-oscillator. Kapitza loste dit probleem op door te beseffen dat er in dit probleem ‘snelle’ en ‘langzame’ oscillaties aanwezig zijn. De langzame oscillaties zijn de bewegingen van de slinger van links naar rechts. De snelle oscillaties zijn alle oscillaties die komen door het aandrijven van de oscillator. Het blijkt namelijk dat, om een stabiele toestand te bereiken, het nodig is om beduidend sneller te oscilleren dan de natuurlijke beweging van de slinger. De langzame oscillaties zijn bovendien de grootste oscillaties: ze hebben de grootste uitwijking en tellen het meeste mee voor de totale beweging die \( \phi \) beschrijft. Wat Kapitza deed, was het systeem oplossen voor het geval waar de kleine, snelle oscillaties alleen worden beschouwd als correcties op de langzame oscillaties. Deze methode is een voorbeeld van storingsrekening: een techniek waarbij een ingewikkeld probleem opgelost wordt door een simpelere variant op te lossen, en vervolgens steeds kleine correcties toe te passen op de eenvoudige oplossing.
Met een paar rekenstappen (zie bijvoorbeeld Wikipedia als je interesse hebt in de technische details) is het mogelijk om de Euler-Lagrangevergelijkingen te herschrijven in de volgende vorm:
\( m l^2 \ddot{\phi} = – \frac{\partial V_{eff}}{\partial \phi} \).
De doorgewinterde wis- en natuurkundeliefhebber herkent hier misschien de wetten van Newton in: De rechterkant van de vergelijking beschrijft een kracht gedefinieerd door de verandering van een potentiële energie. Alle krachten werken zo: een kracht is niets anders dan een verandering van potentiële energie. De linkerkant van de formule is een product van de massa, m, van de oscillator, en de hoekversnelling \( \ddot{\phi} \). (De puntjes geven een tijdsafgeleide aan. Twee puntjes betekent dus dat het over een versnelling gaat.) De potentiële energie in de formule hierboven is een zogenoemde ‘effectieve potentiaal’. Dit is een benadering van de potentiële energie die alle belangrijke onderdelen van ons systeem beschrijft. Deze potentiaal vertelt ons precies wat we al wisten: er bestaat een stabiel punt – een minimum – in de effectieve potentiaal, zoals te zien in de animatie hieronder. Zoals te zien in de animatie zijn er verschillende situaties mogelijk, afhankelijk van de keus van onze parameters. Soms (in ons geval bij lage aandrijf-frequenties) is er alleen een ‘dal’ helemaal aan de rand van de figuur. (Omdat we het over een hoek hebben sluit de rechterkant van de grafiek aan op de linkerkant, dus het gaat hier maar om één dal.) Dit komt overeen met de evenwichtssituatie waarin de slinger simpelweg omlaag hangt. Op een gegeven moment komen we echter in een parameter-regime waar er een lokaal minimum ontstaat in het midden, bij \( \phi = 0 \). Dit komt overeen met een stabiel punt waarbij de slinger recht overeind staat! Zolang we op deze hogere frequentie de slinger blijven aandrijven, zal hij dus stabiel blijven trillen rond dit lokale evenwichtspunt.
Ik vind de Kapitza-slinger een prachtig voorbeeld van een systeem dat feitelijk alleen maar interessant is doordat we er actief iets mee doen: het oscilleren. In veel takken van de wetenschap en de industrie is dat een veelvoorkomend verschijnsel. Een scheikundige reactie werkt misschien alleen als er hitte wordt toegevoegd aan de reactie. Een plant leeft slechts omdat er energie in de plant gaat in de vorm van zonlicht. Een ster bestaat alleen maar omdat er een balans is tussen inkomende energie in de kern van de ster door kernfusies, veroorzaakt door de druk van de zwaartekracht, en een ‘verdamping’ van energie als de ster licht uitzendt. Dit vakgebied van aangedreven systemen is ook mijn persoonlijke onderzoeksrichting, en dus wilde ik jullie graag meenemen in het verhaal over deze eenvoudige, maar desondanks bijzondere oscillator!
[1] De oorspronkelijke paper is tegenwoordig volledig open acces te zien op deze site. De lezer kan voor de uitdaging proberen om de kapitza oscillator te vinden in de formules in de publicatie!